


Pada postingan sebelumnya telah membahas kerja paralel generator. Di sini akan membahas tentang prinsip kerja dan rangkaian ekivalen dari motor sinkron.
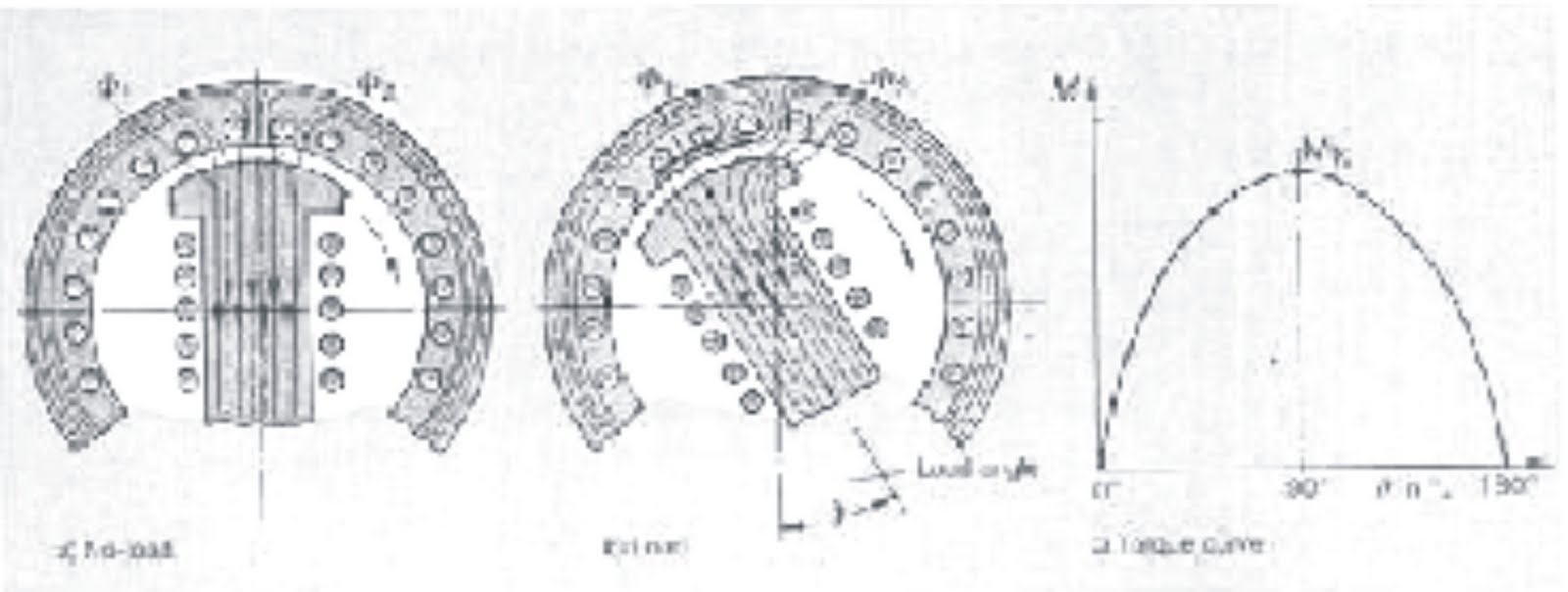
Gambar 1. Terjadinya torsi pada motor sinkron (a) tanpa beban (b) kondisi berbeban (c) kurva karakteristik torsi
Gambar 2.1 memperlihatkan keadaan terjadinya torsi pada motor sinkron. Keadaan ini dapat dijelaskan sebagai berikut: apabila kumparan jangkar (pada stator) dihubungkan dengan sumber tegangan tiga fasa maka akan mengalir arus tiga fasa pada kumparan. Arus tiga fasa pada kumparan jangkar ini menghasilkan medan putar homogen (BS). Berbeda dengan motor induksi, motor sinkron mendapat eksitasi dari sumber DC eksternal yang dihubungkan ke rangkaian rotor melalui slip ring dan sikat. Arus DC pada rotor ini menghasilkan medan magnet rotor (BR) yang tetap. Kutub medan rotor mendapat tarikan dari kutub medan putar stator hingga turut berputar dengan kecepatan yang sama (sinkron). Torsi yang dihasilkan motor sinkron merupakan fungsi sudut torsi (δ). Semakin besar sudut antara kedua medan magnet, maka torsi yang dihasilkan akan semakin besar seperti persamaan di bawah ini.
T = k .BR .Bnet sin δ
Pada beban nol, sumbu kutub medan putar berimpit dengan sumbu kumparan medan (δ = 0). Setiap penambahan beban membuat medan motor “tertinggal” dari medan stator, berbentuk sudut kopel (δ); untuk kemudian berputar dengan kecepatan yang sama lagi. Beban maksimum tercapai ketika δ = 90. Penambahan beban lebih lanjut mengakibatkan hilangnya kekuatan torsi dan motor disebut kehilangan sinkronisasi. Oleh karena pada motor sinkron terdapat dua sumber pembangkit fluks yaitu arus bolak-balik (AC) pada stator dan arus searah (DC) pada rotor, maka ketika arus medan pada rotor cukup untuk membangkitkan fluks (ggm) yang diperlukan motor, maka stator tidak perlu memberikan arus magnetisasi atau daya reaktif dan motor bekerja pada faktor daya = 1,0. Ketika arus medan pada rotor kurang (penguat bekurang), stator akan menarik arus magnetisasi dari jala-jala, sehingga motor bekerja pada faktor daya terbelakang (lagging). Sebaliknya bila arus pada medan rotor belebih (penguat berlebih), kelebihan fluks (ggm) ini harus diimbangi, dan stator akan menarik arus yang bersifat kapasitif dari jala-jala, dan karenanya motor bekerja pada faktor daya mendahului (leading). Dengan demikian, faktor daya motor sinkron dapat diatur dengan mengubah-ubah harga arus medan (IF)
Rangkaian Ekuivalen Motor Sinkron
Motor sinkron pada dasarnya adalah sama dengan generator sinkron, kecuali arah aliran daya pada motor sinkron merupakan kebalikan dari generator sinkron. Oleh karena arah aliran daya pada motor sinkron dibalik, maka arah aliran arus pada stator motor sinkron juga dapat dianggap dibalik. Maka rangkaianekuivalen motor sinkron adalah sama dengan rangkaian ekuivalen generator sinkron, kecuali arah arus Ia dibalik. Bentuk rangkaian ekuivalen motor sinkron diperlihatkan pada gambar 2.

Gambar 2. Rangkaian ekuivalen motor sinkron
Dari gambar 2.2 dapat dibuatkan persamaan tegangan rangkaian ekuivalen motor sinkron sebagai berikut.
Vθ = Ea + Ia.Ra + j.Ia.XS
atau :
Ea = Vθ - Ia.Ra – j.Ia.XS
posting yang sangat bermanfaat,, matur tengktyu
ReplyDeleteTerimaTerima kasih atas postingan motor sinkron
ReplyDelete